


Macchina collaborativa per il serraggio delle viti a sei assi

Parametro del dispositivo
| Modello | GR-XFXZ950 |
| Portata del robot | 950mm |
| Carico finale del robot | 16 kg |
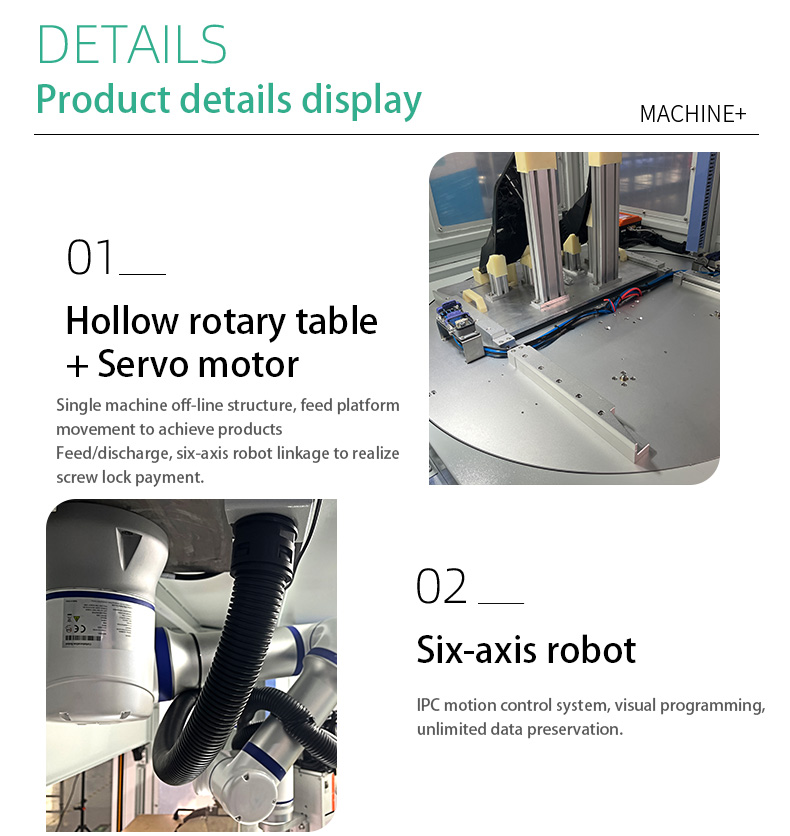
| Piattaforma di alimentazione | Tavola rotante di controllo centrale + servomotore |
| Metodo di alimentazione | Blow/a spirate sono compatibili |
| Rendimento di lock-up | 99,95% |
| Alimentatore funzionante | AC220V |
| Fonte d'aria funzionante | 0,4-0,7 MPa |
| energia | Circa 2,5 KW |
| Imposta il metodo di coordinate | Posizionamento visivo |
| Dimensioni esterne (L*W*H) | 1400*1900*1950mm |
| Peso (KG) | 800 |
| Condizione | Nuovo |
| Garanzia dei componenti principali | 2 anni |
Caratteristiche del dispositivo
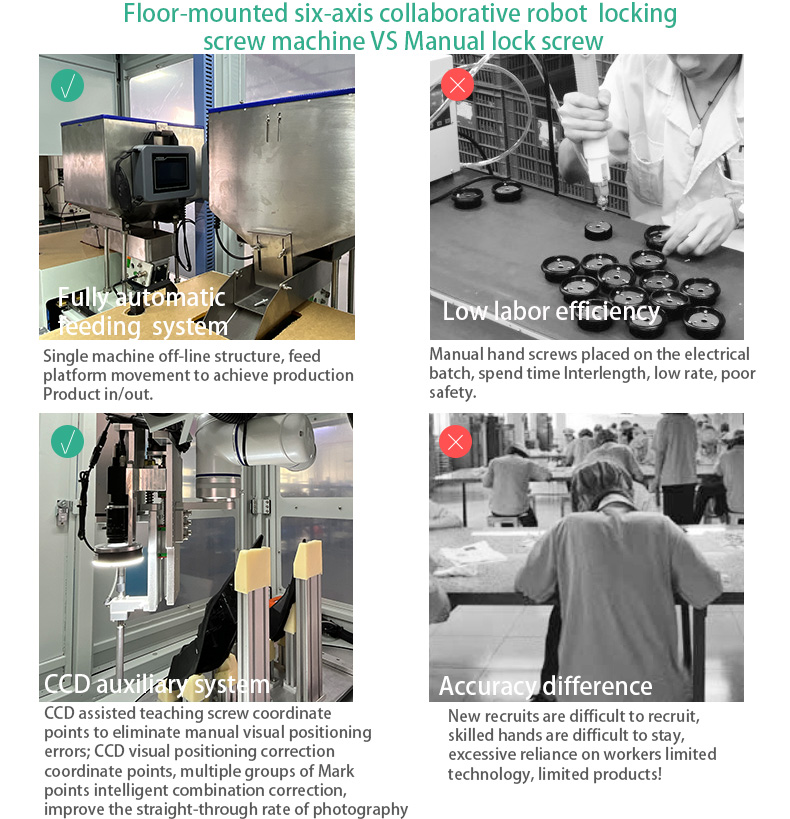
1. Struttura offline a macchina singola, movimento della piattaforma di alimentazione per ottenere l'input/output del prodotto, collegamento del robot a sei assi per ottenere il pagamento del blocco della vite
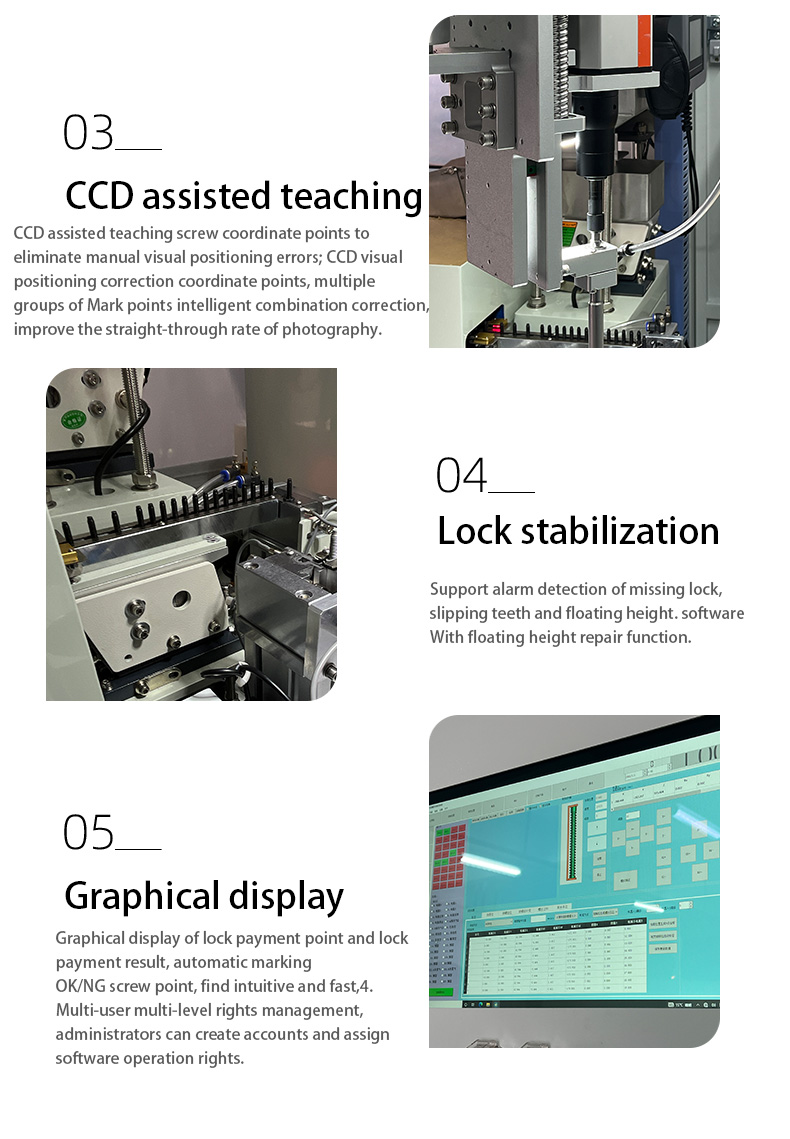
2. Sistema di controllo del movimento IPC, programmazione visiva, archiviazione dati illimitata;
3. Visualizza graficamente il punto di pagamento del blocco e il risultato del pagamento del blocco, contrassegna automaticamente il punto di avvitamento OK/NG, trova in modo intuitivo e veloce;
4.. Gestione dei diritti multiutente e multilivello, gli amministratori possono creare account e assegnare diritti operativi al software
5. Punti di coordinate della vite di insegnamento assistiti dal CCD per eliminare gli errori di posizionamento visivo manuale; punti di coordinate di correzione del posizionamento visivo del CCD, più gruppi di punti di marcatura, correzione intelligente della combinazione, migliorano la velocità di passaggio delle foto;
6. Supporta il rilevamento di allarmi per serrature mancanti, denti che scivolano e altezza fluttuante. Il software è dotato di una funzione di riparazione dell'altezza fluttuante;
7. L'asse Z può essere configurato con sensore di spostamento laser (per misurare l'altezza di galleggiamento) e sensore di rilevamento della pressione discendente (opzionale);
8. Il lotto elettrico può essere dotato di lotto elettrico HIOS, lotto elettrico Qili speed, lotto elettrico servo, lotto elettrico intelligente, ecc. (opzionale);
9. L'apparecchiatura può caricare MES in base alle esigenze del cliente, come coppia, numero di giri, angolo, curva di coppia, stato di blocco.
10. È possibile selezionare la scansione manuale e la scansione automatica (opzionale)
11. I dati di produzione possono essere tracciati e il software è dotato di un pannello di controllo qualità. È possibile caricare e scaricare tutti i tipi di dati (opzionale);
12. Controllo automatico del punto di coppia, memorizzazione dei risultati del controllo del punto di coppia e query (facoltativo).

Dettagli


Categorie di prodotti
-

Tipo di adsorbimento spalla a spalla Vite a tenuta stagna...
-

Macchina per il serraggio delle viti schiena contro schiena
-

Macchina per avvitare a doppia stazione da tavolo
-

Tipo di adsorbimento a doppia stazione verticale a vite T...
-

Macchina per il serraggio delle viti a soffiaggio d'aria
-

Macchina per il serraggio delle viti a doppia stazione verticale





